Chapter 4 Code#
Let’s start with some imports.
import numpy as np
import matplotlib.pyplot as plt
from numba import jit
from quantecon import MarkovChain
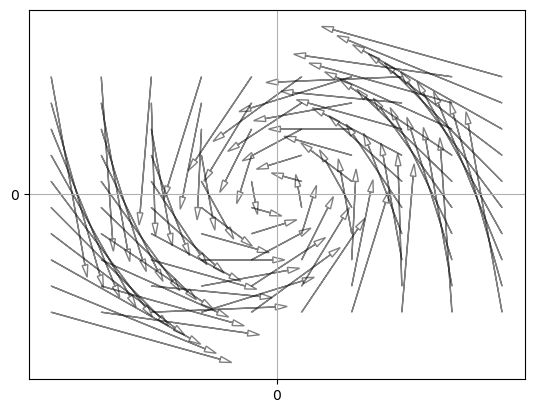
Introduction to Dynamics#
Here’s the code that generated figure 4.1.
def draw_arrow(x, y, xp, yp, ax):
"""
Draw an arrow from (x, y) to (xp, yp).
"""
v1, v2 = xp - x, yp - y
eps = 1.0
nrm = np.sqrt(v1**2 + v2**2)
scale = 1.0
ax.arrow(x, y, scale * v1, scale * v2,
antialiased=True,
alpha=0.5,
head_length=0.025*(xmax - xmin),
head_width=0.012*(xmax - xmin),
fill=False)
xmin, xmax = -10.0, 10.0
ymin, ymax = -5.0, 5.0
A1 = np.asarray([[0.55, -0.6],
[0.5, 0.4]])
def f(x, y):
return A1 @ (x, y)
xgrid = np.linspace(xmin * 0.95, xmax * 0.95, 10)
ygrid = np.linspace(ymin * 0.95, ymax * 0.95, 10)
fig, ax = plt.subplots()
#ax.set_xlim(xmin, xmax)
#ax.set_ylim(ymin, ymax)
ax.set_xticks((0,))
ax.set_yticks((0,))
ax.grid()
for x in xgrid:
for y in ygrid:
xp, yp = f(x, y)
draw_arrow(x, y, xp, yp, ax)
#plt.savefig("sdsdiagram.pdf") # Uncomment to save figure
plt.show()
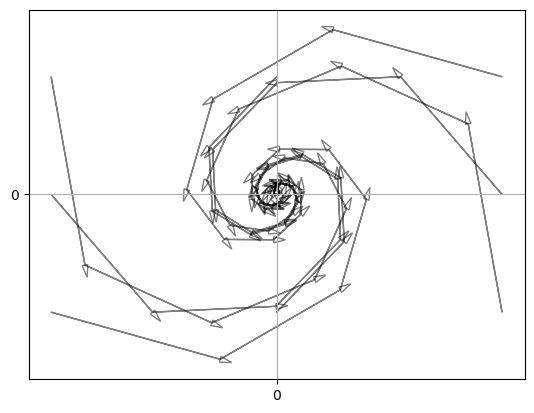
And here’s the code that generated figure 4.2.
def draw_trajectory(x, y, ax, n=10):
"""
Draw the trajectory of length n starting from (x, y).
"""
for i in range(n):
x_new, y_new = f(x, y)
draw_arrow(x, y, x_new, y_new, ax)
x, y = x_new, y_new
xgrid = np.linspace(xmin * 0.95, xmax * 0.95, 3)
ygrid = np.linspace(ymin * 0.95, ymax * 0.95, 3)
fig, ax = plt.subplots()
#ax.set_xlim(xmin, xmax)
#ax.set_ylim(ymin, ymax)
ax.set_xticks((0,))
ax.set_yticks((0,))
ax.grid()
for x in xgrid:
for y in ygrid:
draw_trajectory(x, y, ax)
#plt.savefig("sdsstable.pdf") # Uncomment to save figure
plt.show()
Chaotic Dynamics#
Just for fun, here’s a little class that allows us to simulate trajectories from a specified dynamical system:
class DS:
def __init__(self, h=None, x=None):
"""Parameters: h is a function and x is an
element of S representing the current state."""
self.h, self.x = h, x
def update(self):
"Update the state of the system by applying h."
self.x = self.h(self.x)
def trajectory(self, n):
"""Generate a trajectory of length n, starting
at the current state."""
traj = []
for i in range(n):
traj.append(self.x)
self.update()
return traj
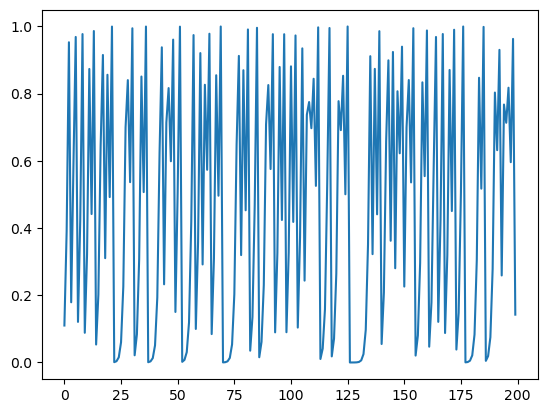
As in the textbook, let’s plot a trajectory starting from 0.11.
q = DS(h=lambda x: 4 * x * (1 - x), x=0.11)
t = q.trajectory(200)
fig, ax = plt.subplots()
ax.plot(t)
plt.show()
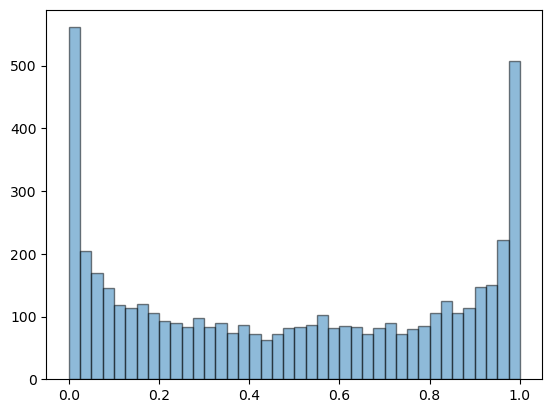
Now let’s generate a histograms from a long trajectory, to address exercise 4.16.
q.x = 0.11
t = q.trajectory(5000)
fig, ax = plt.subplots()
ax.hist(t, bins=40, alpha=0.5, edgecolor='k')
plt.show()
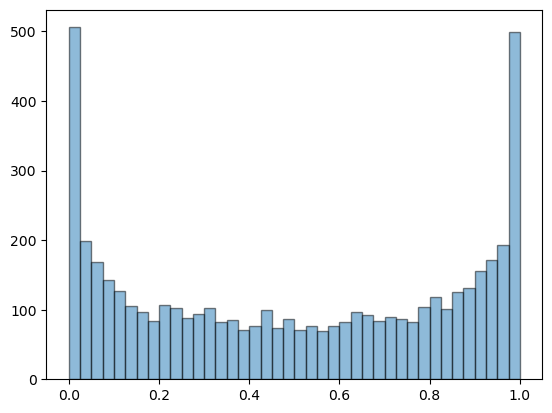
If you experiment with different initial conditions you will find that, for all most all choices, the histogram looks the same.
q.x = 0.65
t = q.trajectory(5000)
fig, ax = plt.subplots()
ax.hist(t, bins=40, alpha=0.5, edgecolor='k')
plt.show()
What we have learned is that, although the trajectories seem very random, when we take a statistical perspective we can make predictions.
In particular, we can say what will happen “one average, in the long run.”
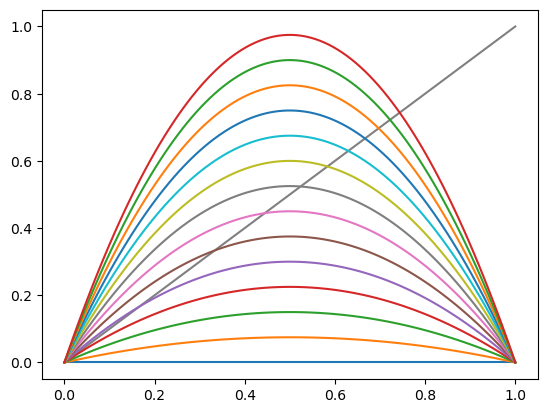
Here’s the set of maps.
xgrid = np.linspace(0, 1, 100)
h = lambda x, r: r * x * (1 - x)
fig, ax = plt.subplots()
ax.plot(xgrid, xgrid, '-', color='grey')
r = 0
step = 0.3
while r <= 4:
y = [h(x, r) for x in xgrid]
ax.plot(xgrid, y)
r = r + step
plt.show()
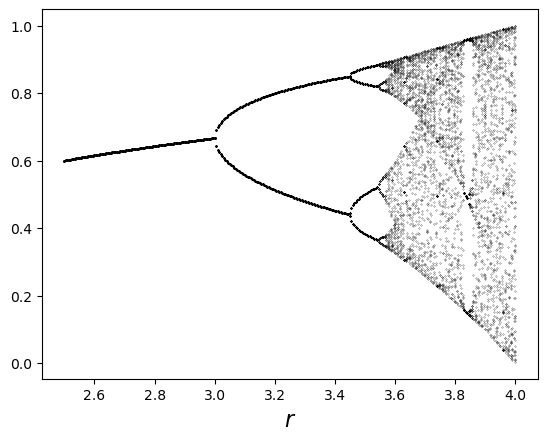
Here’s the bifurcation diagram.
q = DS(h=None, x=0.1)
fig, ax = plt.subplots()
r = 2.5
while r < 4:
q.h = lambda x: r * x * (1 - x)
t = q.trajectory(1000)[950:]
ax.plot([r] * len(t), t, 'k.', ms=0.4)
r = r + 0.005
ax.set_xlabel('$r$', fontsize=16)
plt.show()
Markov Chains#
Our first task is to simulate time series from Hamilton’s Markov chain
p_H = ((0.971, 0.029, 0.000), # Hamilton's kernel
(0.145, 0.778, 0.077),
(0.000, 0.508, 0.492))
p_H = np.array(p_H) # Convert to numpy array
S = np.array((0, 1, 2))
We’ll borrow this code from Chapter 2.
@jit
def tau(z, S, phi):
i = np.searchsorted(np.cumsum(phi), z)
return S[i]
(We have targeted the function for JIT compilation via @jit because we need
fast execution below.)
As discussed in that chapter, if we create a function tau using this code and feed it uniform draws on \((0,1]\), we get draws from S distributed according to phi.
Here’s some code to generate a trajectory starting at \(x \in S\), using stochastic kernel \(p\).
def trajectory(x, p, S, n=100):
X = np.empty(n, dtype=int)
X[0] = x
for t in range(n-1):
W = np.random.rand()
X[t+1] = tau(W, S, p[X[t], :])
return X
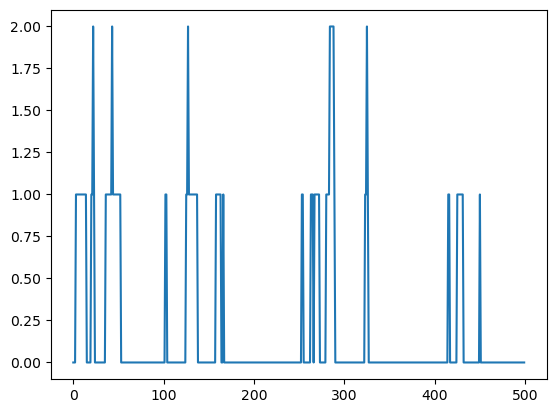
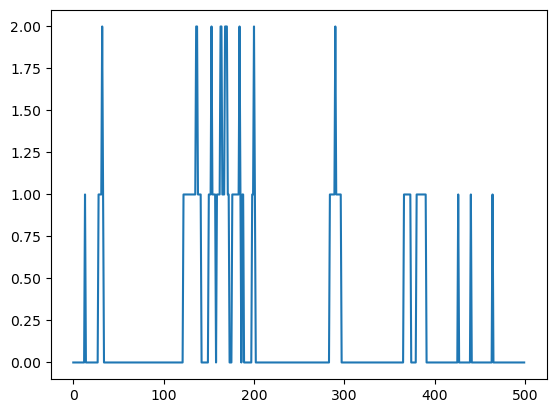
Let’s plot a trajectory.
fig, ax = plt.subplots()
X = trajectory(0, p_H, S, n=500)
ax.plot(X)
plt.show()
Another option is to use existing code from QuantEcon. This code is JIT-compiled and very fast.
mc = MarkovChain(p_H, state_values=S)
X = mc.simulate(init=0, ts_length=500)
fig, ax = plt.subplots()
ax.plot(X)
plt.show()
Here’s a solution to exercise 4.23.
@jit
def compute_marginal(n=100_000, T=10):
X_vals = np.empty(n)
for i in range(n):
X = 2 # start in state SR
for t in range(T):
W = np.random.rand()
X = tau(W, S, p_H[X, :])
X_vals[i] = X
return np.mean(X_vals == 0)
compute_marginal()
0.59799
The answer is close to 0.6, as expected.
Here’s a solution to exercise 4.24.
@jit
def compute_marginal_2(n=100_000, T=10):
counter = 0
for i in range(n):
X = 2 # start in state SR
for t in range(T):
W = np.random.rand()
X = tau(W, S, p_H[X, :])
if X == 0:
counter += 1
return counter / n
compute_marginal_2()
0.59549
Here’s a solution to exercise 4.29.
T = 5
psi = (1, 0, 0) # start in NG
h = (1000, 0, -1000) # profits
for t in range(T):
psi = psi @ p_H
print(psi @ h)
885.347632676323
Now let’s see what happens when we start in severe recession.
psi = (0, 0, 1)
for t in range(T):
psi = psi @ p_H
print(psi @ h)
217.74304876607997
Profits are much lower because the Markov chain is relatively persistent, implying that starting in recession increases the probability of recession at date \(t=5\).
Here’s a solution to exercise 4.30.
T = 1000
for i in (0, 1, 2):
psi = np.zeros(3)
psi[i] = 1
for t in range(T):
psi = psi @ p_H
print(f"Profits in state {i} at date {T} equals {psi @ h}")
Profits in state 0 at date 1000 equals 788.1599999999967
Profits in state 1 at date 1000 equals 788.1599999999974
Profits in state 2 at date 1000 equals 788.1599999999972
Notice that profits are almost invariant with respect to the initial condition.
This is due to inherent stability of the kernel, which implies that initial conditions become irrelevant after sufficient time has elapsed.
Here’s a solution to exercise 4.31.
T = 5
psi = (0.2, 0.2, 0.6)
for t in range(T):
psi = psi @ p_H
print(psi @ h)
385.45189053788556
Here’s a solution to exercise 4.32.
def path_prob(p, psi, X): # X gives a time path
prob = psi[X[0]]
for t in range(len(X)-1):
prob = prob * p[X[t], X[t+1]]
return prob
psi = np.array((0.2, 0.2, 0.6))
prob = path_prob(p_H, psi, (0, 1, 0))
print(prob)
0.0008410000000000001
Here’s a solution to exercise 4.33.
counter = 0
recession_states = 1, 2
for x0 in recession_states:
for x1 in recession_states:
for x2 in recession_states:
path = x0, x1, x2
counter += path_prob(p_H, psi, path)
print(counter)
0.704242
Here’s a solution to exercise 4.34.
counter = 0
m = 10_000
mc = MarkovChain(p_H)
for i in range(m):
x0 = tau(np.random.rand(), S, psi)
X = mc.simulate(init=x0, ts_length=3)
if 0 not in X:
counter += 1
print(counter / m)
0.7021
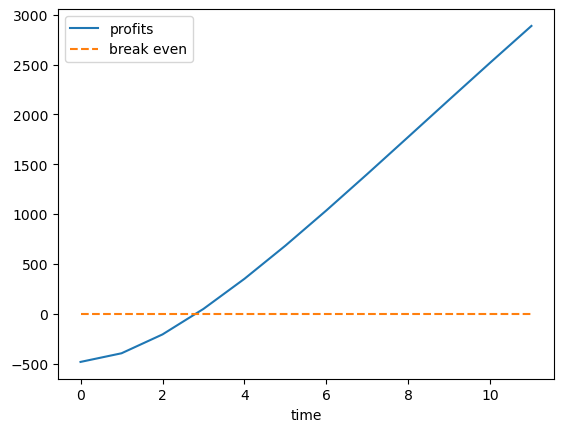
Next we turn to exercise 4.36.
max_T = 12
T_vals = range(max_T)
profits = []
r = 0.05
rho = 1 / (1+r)
psi = (0.2, 0.2, 0.6)
h = (1000, 0, -1000)
current_profits = np.inner(psi, h)
discount = rho
Q = np.identity(3)
for t in T_vals:
Q = Q @ p_H
current_profits += discount * np.inner(psi, Q @ h)
profits.append(current_profits)
discount = discount * rho
fig, ax = plt.subplots()
ax.plot(profits, label='profits')
ax.plot(np.zeros(max_T), '--', label='break even')
ax.set_xlabel('time')
ax.legend()
plt.show()
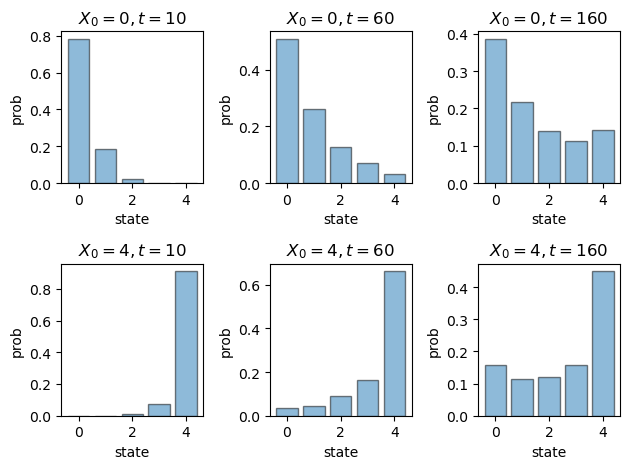
Here’s figure 4.11.
p_Q = ((0.97 , 0.03 , 0.00 , 0.00 , 0.00),
(0.05 , 0.92 , 0.03 , 0.00 , 0.00),
(0.00 , 0.04 , 0.92 , 0.04 , 0.00),
(0.00 , 0.00 , 0.04 , 0.94 , 0.02),
(0.00 , 0.00 , 0.00 , 0.01 , 0.99))
p_Q = np.array(p_Q)
states = 0, 1, 2, 3, 4
dates = 10, 60, 160
initial_states = 0, 4
rows, cols = 2, 3
fig, axes = plt.subplots(rows, cols)
for row, init in enumerate(initial_states):
psi = np.zeros(5)
psi[init] = 1
for col, d in enumerate(dates):
ax = axes[row, col]
ax.bar(states,
psi @ np.linalg.matrix_power(p_Q, d),
alpha=0.5,
edgecolor='k')
ax.set_title(f"$X_0 = {init}, t = {d}$")
ax.set_ylabel("prob")
ax.set_xlabel("state")
plt.tight_layout()
#plt.savefig("dds2.pdf")
plt.show()
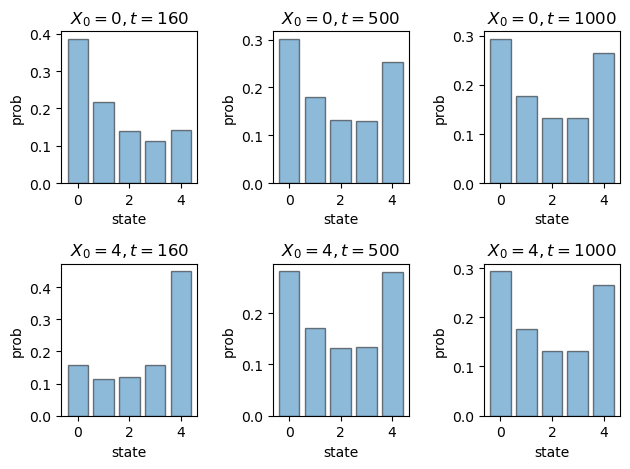
And here’s figure 4.12.
dates = 160, 500, 1000
fig, axes = plt.subplots(rows, cols)
for row, init in enumerate(initial_states):
psi = np.zeros(5)
psi[init] = 1
for col, d in enumerate(dates):
ax = axes[row, col]
ax.bar(states,
psi @ np.linalg.matrix_power(p_Q, d),
alpha=0.5,
edgecolor='k')
ax.set_title(f"$X_0 = {init}, t = {d}$")
ax.set_ylabel("prob")
ax.set_xlabel("state")
plt.tight_layout()
#plt.savefig("dds3.pdf")
plt.show()
Next we turn to exercise 4.42.
First here’s a function to compute the stationary distribution, assuming it is unique.
from numpy.linalg import solve
def compute_stationary(p):
N = p.shape[0]
I = np.identity(N)
O = np.ones((N, N))
A = I - p + O
return solve(A.T, np.ones((N, 1))).flatten()
Now let’s apply it to p_Q.
psi_star = compute_stationary(p_Q)
fig, ax = plt.subplots()
ax.bar(states, psi_star, alpha=0.5, edgecolor='k')
plt.show()
As expected, the distribution is very similar to the time 1,000 distribution we obtained above by shifting forward in time.
Now let’s look at exercise 4.43.
psi_star = compute_stationary(p_H)
print(np.inner(psi_star, h))
788.1600000000004
If we compute profits at \(t=1000\), starting from a range of initial conditions, we get very similar results.
pT = np.linalg.matrix_power(p_H, 1000)
psi_vecs = (1, 0, 0), (0, 1, 0), (0, 0, 1)
for psi in psi_vecs:
print(np.inner(psi, pT @ h))
788.159999999977
788.1599999999776
788.1599999999777
This is not surprising, since p_H is globally stable.
Here’s the solution to exercise 4.57, which computes mean return time.
I’ll use JIT compilation to make the code fast.
@jit
def compute_return_time(x, p, max_iter=100_000):
X = x
t = 0
while t < max_iter:
W = np.random.rand()
X = tau(W, S, p_H[X, :])
t += 1
if X == x:
return t
@jit
def compute_mean_return_time(x, p, n=100_000):
counter = 0
for i in range(n):
counter += compute_return_time(x, p)
return counter / n
[compute_mean_return_time(i, p_H) for i in range(3)]
[1.23226, 6.17647, 40.34466]
For comparison:
psi_star = compute_stationary(p_H)
1/ psi_star
array([ 1.23031496, 6.1515748 , 40.58441558])
As predicted by the theory, the values are approximately equal.
Now let’s turn to the inventory model.
def b(d):
" Returns probability that demand = d."
return (d >= 0) * (1/2)**(d + 1)
def h(x, q, Q):
return x + (Q - x) * (x <= q)
def build_p(q=2, Q=5):
p = np.empty((Q+1, Q+1))
for x in range(Q+1):
for y in range(Q+1):
if y == 0:
p[x,y] = (1/2)**h(x, q, Q) # prob D >= h(x, q)
else:
p[x,y] = b(h(x, q, Q) - y) # prob h(x, q) - D = y
return p
Let’s verify that the stationary distribution at \(q=2\) and \(Q=5\) matches the one shown in the text.
p = build_p()
compute_stationary(p)
array([0.0625, 0.0625, 0.125 , 0.25 , 0.25 , 0.25 ])
Yep, looks good.
Now let’s check that the optimal policy agrees with \(q=7\), as claimed in the text.
Q = 20 # inventory upper bound
C = 0.1 # cost of restocking
# profit given state x, demand d, policy q
def profit(x, d, q):
stock = h(x, q, Q)
revenue = stock if stock < d else d
cost = C * (x <= q)
return revenue - cost
# expected profit given x and policy q
def g(x, q):
counter = 0
for d in range(1000):
counter += profit(x, d, q) * b(d)
return counter
def profit_at_stationary(q):
p = build_p(q=q, Q=Q)
stationary = compute_stationary(p)
counter = 0
for x in range(Q+1):
counter += g(x, q) * stationary[x]
return counter
def compute_optimal_policy():
running_max = -np.inf
for q in range(Q+1):
counter = profit_at_stationary(q)
if counter > running_max:
running_max = counter
argmax = q
return(argmax)
compute_optimal_policy()
7
Here’s a solution for exercise 4.61. From preceding calculations we have the stationary probability assigned to normal growth:
psi_star = compute_stationary(p_H)
psi_star[0]
0.8128000000000003
The fraction of the time a long path spends in this state can be calculated as follows.
T = 1_000_000
mc = MarkovChain(p_H)
X = mc.simulate(init=0, ts_length=T)
np.mean(X == 0)
0.811182
As expected given the LLN results for stable Markov chains, the two numbers are approximately equal.
Finally, let’s look at the expected profits question in exercise 4.63.
Previously we calculated steady state profits via
h = (1000, 0, -1000)
psi_star = compute_stationary(p_H)
print(np.inner(psi_star, h))
788.1600000000004
To check that we get approximately the same results when simulating a long time series, we can calculate as follows.
y = [h[x] for x in X]
np.mean(y)
786.056